Design_Documentation01
整理了自己写的一些算法实现的设计思路
Delaunay Triangulation
理论及算法的介绍:请参见这里,《Computational Geometry》书中第九章的笔记
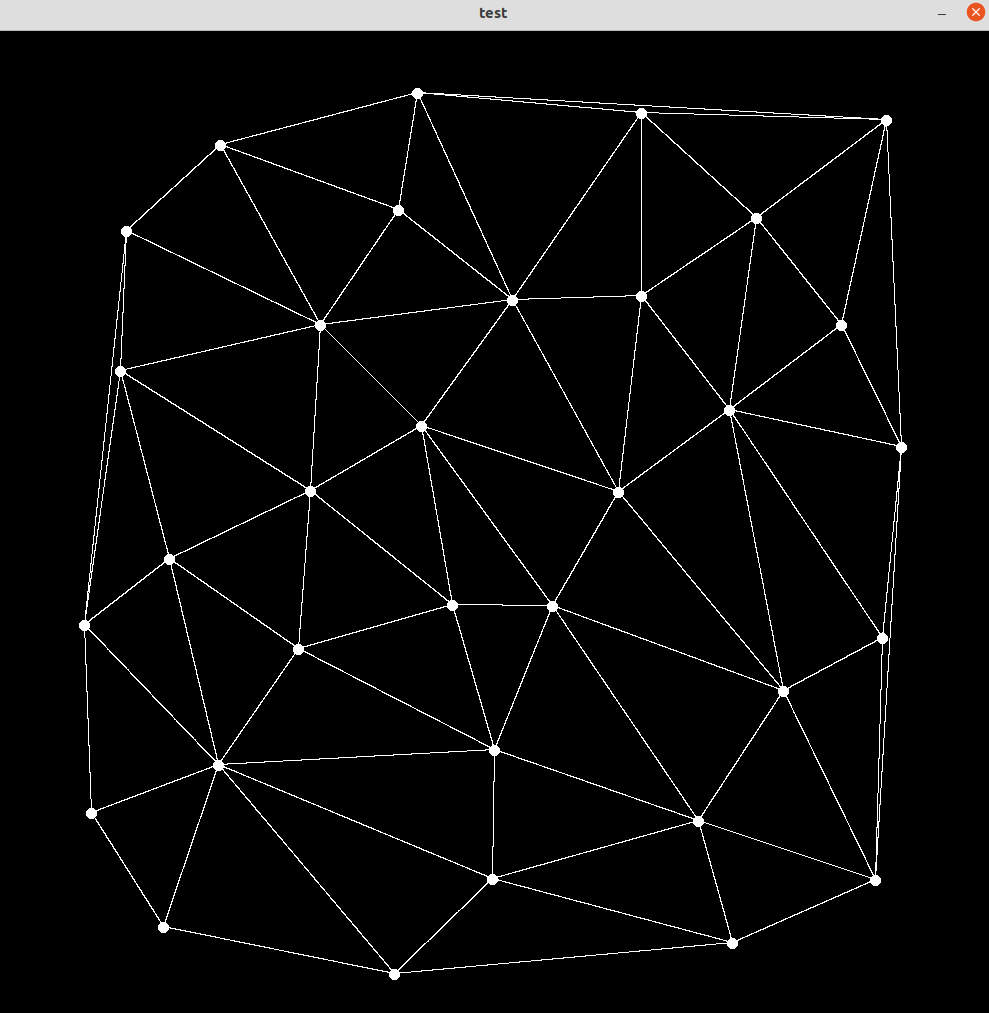
程序最后实现了如下目标:对于输入的散点(通过触发鼠标事件或者在main.cpp中设定):

生成其对应的Delaunay三角剖分网格:
设计1:底层类的设计
底层类中定义了Vector类、Triangle类:
class Vector2f
{
public:
// Constructors
Vector2f();
Vector2f(const float&);
Vector2f(const float&, const float&);
// Operators overloading
Vector2f operator*(const float&) const;
Vector2f operator/(const float&) const;
Vector2f operator+(const Vector2f&) const;
Vector2f operator-(const Vector2f&) const;
Vector2f operator-() const;
Vector2f operator+=(const Vector2f&);
bool operator==(const Vector2f&);
bool operator!=(const Vector2f&);
friend Vector2f operator*(const float&, const Vector2f&);
friend std::ostream& operator<<(std::ostream&, const Vector2f&);
// Get the norm of a vector
float norm() const;
// Return the normalized vector(but not change original vector)
Vector2f normalize() const;
// Return the normalized vector(and change original vector)
Vector2f normalized();
// Compute the dot product
float dotProduct(const Vector2f&) const;
// Return value is positive when the vector obtained
// by cross product points to the outer of plane.
float crossProduct(const Vector2f&) const;
// Data members
float x, y;
};
class Triangle
{
public:
// Constructor
Triangle(const Vector2f&, const Vector2f&, const Vector2f&);
// Ostream operator overloading
friend std::ostream& operator<<(std::ostream&, const Triangle&);
// Data members
Vector2f v0, v1, v2; // vertices A, B, C, counter-clockwise order
};
对于输入的点集,这里利用的是stl库中的vector容器中包含自己定义的Vector2f,这样的好处在于可以使自己在处理一些简单事情的时候(比如统计点集规模、添加点)可以不用额外定义函数了。
代码结构02 用来实现Delaunay三角剖分的链表结构
正如理论中所说,为了能够实现按点添加的算法,我们除了直接存储网格中现有的三角形结构,还需要存储之前删除的三角形结构,并能体现一定的包含关系,因此我定义了两类新的数据结构:树和链表:
树节点及树:
struct TreeNode{
int tri_v0, tri_v1, tri_v2;
std::shared_ptr<TreeNode> child0, child1, child2;
int childNum;
std::shared_ptr<ListNode> listnode;
TreeNode(int _v0, int _v1, int _v2)
};
class TriangleTree
{
public:
TriangleTree();
~TriangleTree();
public:
std::shared_ptr<TreeNode> root;
};
链表节点及链表:
struct ListNode{
int tri_v0, tri_v1, tri_v2;
std::shared_ptr<ListNode> pre, next;
std::shared_ptr<TreeNode> treenode;
ListNode(int _v0, int _v1, int _v2)
};
class TriangleList
{
public:
// Basic operations
void addPoint(const std::vector<Vector2f>&, const int&, TriangleTree&, TriangleList&);
void triangulation(std::vector<Vector2f>&);
// Legalize edges
void linkEdge(std::shared_ptr<ListNode>);
void unlinkEdge(const int, const int, std::shared_ptr<ListNode>);
void unlinkEdge(std::shared_ptr<ListNode>);
void legalizeEdge(const int, const int, const int, const std::vector<Vector2f>&);
// Rendering
void drawTriangulation(const std::vector<Vector2f>&, Screen&);
// Data members
std::shared_ptr<ListNode> head;
std::vector<std::vector<std::vector<std::shared_ptr<ListNode>>>> edgeTable;
};
这里有两个设计是值得特别注意的:
- 节点结构(ListNode和TreeNode)并没有定义在对应的类(TriangleList和TriangleTree)内,这样做的原因是我们需要两种节点交叉引用,但是如果定义在类内的话,但我们进行交叉引用的时候,编译器就会因为没有提前声明两个节点结构而报错。
- 所有用到的指针都是智能指针(smart pointer)而并非原始指针(raw pointer),因此并没有写相应的析构函数(都使用了标准库中容器的默认析构函数),这样做的原因是当我们处理边翻转的情况的时候,需要将两个三角形的子节点对应到另外两个子节点,这样的设计在进行递归析构的时候就会产生问题:由于析构函数中采用了后序遍历的方法析构每个树节点,这样两个子节点的位置就会被析构两次,从而造成内存泄漏。
代码结构03 核心算法的实现
这个部分都在DelaunayTriangulation.h文件中。按理论中的内容,按顺序说明如下:
如何处理Bounding Triangle?
这里是按书中算法,设定了两个“观念上的”额外点,用来在定义的时候它们的坐标设定为-1和-2,并且在进入添加点的循环之前,首先创造了一个bounding triangle:
// construct bounding triangle
head.reset(new ListNode(-2, -1, 0));
TriangleTree tree;
tree.root.reset(new TreeNode(-2, -1, 0));
linkEdge(head);
crossLink(head, tree.root);
在其他几个函数中,因为可能涉及到处理bounding triangle,因此额外添加了对应的解决办法:
- bool isLeft():用来判断一个点是否在一个三角形中;
- bool isLegal():用来判断一条边是否合规(若不合规需要进行边翻转操作)
此外,在定义存储链表节点的邻接矩阵中,也要相应的把规模扩大2。
在结束的时候,记得要把所有带有辅助点的三角形从链表结构中撤除:
// remove unreal triangles
std::shared_ptr<ListNode> ptr = head;
while(ptr != nullptr) {
if(ptr->tri_v0 < 0 || ptr->tri_v1 < 0 || ptr->tri_v2 < 0) {
if(ptr == head) {
head = head->next;
head->pre = nullptr;
ptr.reset();
ptr = head;
}
else {
std::shared_ptr<ListNode> tmp = ptr->next;
ptr->pre->next = ptr->next;
if(ptr->next != nullptr)
ptr->next->pre = ptr->pre;
ptr.reset();
ptr = tmp;
}
}
else
ptr = ptr->next;
}
如何添加新的点到已有三角形节点链表中?
首先,我们需要判断一个点是否在一个三角形中,采取的方法是通过外积的符号去判断该点与三条边的(在平面上的)位置关系(点在边所处直线划分出的左半平面还是右半平面):
bool inTriangle(const int indr, const int ind0, const int ind1, const int ind2, const std::vector<Vector2f>& pointSet) {
if(isLeft(indr, ind0, ind1, pointSet) == false || isLeft(indr, ind1, ind2, pointSet) == false || isLeft(indr, ind2, ind0, pointSet) == false)
return false;
return true;
}
整体上,我们利用了树结构来处理不同层次的点相互之间的嵌套关系:
void findTriangle(const int indr, const std::shared_ptr<TreeNode> ptr, std::vector<std::shared_ptr<ListNode>>& ptrVec, const std::vector<Vector2f>& pointSet) {
if(ptr == nullptr) return;
if(inTriangle(indr, ptr->tri_v0, ptr->tri_v1, ptr->tri_v2, pointSet)) {
if(ptr->child0 == nullptr) {
for(int i = 0; i < ptrVec.size(); i++)
if(ptrVec[i] == ptr->listnode) return;
ptrVec.push_back(ptr->listnode);
return;
}
else {
findTriangle(indr, ptr->child0, ptrVec, pointSet);
findTriangle(indr, ptr->child1, ptrVec, pointSet);
findTriangle(indr, ptr->child2, ptrVec, pointSet);
}
}
return ;
}
为了实现这样的目的,我们还需要在新建每个树节点和链表节点之后,进行一步 交叉引用 的操作:
void crossLink(std::shared_ptr<ListNode> lnode, std::shared_ptr<TreeNode> tnode) {
lnode->treenode = tnode;
tnode->listnode = lnode;
}
在有了上述的基础之后,我们就可以进行添加点的操作,注意到有两种可能的添加点方式:点位于三角形中,就把这个三角形分裂成三个三角形;点位于一条已有边上,就把这条边所在的两个三角形分裂成四个三角形。在每种情况的最后,还要进行边翻转的操作(下一节详细介绍)。具体代码如下:
void TriangleList::addPoint(const std::vector<Vector2f>& pointSet, const int& index, TriangleTree& tree){
Vector2f point = pointSet[index];
std::vector<std::shared_ptr<ListNode>> ptrVec;
findTriangle(index, tree.root, ptrVec, pointSet);
if(ptrVec.size() == 1) {
std::shared_ptr<ListNode> ptr = ptrVec[0];
int ind0 = ptr->tri_v0, ind1 = ptr->tri_v1, ind2 = ptr->tri_v2;
std::shared_ptr<TreeNode> current_treenode = ptr->treenode;
std::shared_ptr<ListNode> new_listnode0(new ListNode(index, ind0, ind1));
std::shared_ptr<ListNode> new_listnode1(new ListNode(index, ind1, ind2));
std::shared_ptr<ListNode> new_listnode2(new ListNode(index, ind2, ind0));
std::shared_ptr<TreeNode> new_treenode0(new TreeNode(index, ind0, ind1));
std::shared_ptr<TreeNode> new_treenode1(new TreeNode(index, ind1, ind2));
std::shared_ptr<TreeNode> new_treenode2(new TreeNode(index, ind2, ind0));
linkEdge(new_listnode0);
linkEdge(new_listnode1);
linkEdge(new_listnode2);
crossLink(new_listnode0, new_treenode0);
crossLink(new_listnode1, new_treenode1);
crossLink(new_listnode2, new_treenode2);
current_treenode->childNum = 3;
current_treenode->child0 = new_treenode0;
current_treenode->child1 = new_treenode1;
current_treenode->child2 = new_treenode2;
if(ptr->pre == nullptr)
head = new_listnode0;
else {
ptr->pre->next = new_listnode0;
new_listnode0->pre = ptr->pre;
}
new_listnode0->next = new_listnode1;
new_listnode1->pre = new_listnode0;
new_listnode1->next = new_listnode2;
new_listnode2->pre = new_listnode1;
new_listnode2->next = ptr->next;
if(new_listnode2->next != nullptr)
new_listnode2->next->pre = new_listnode2;
unlinkEdge(ptr);
ptr.reset();
legalizeEdge(index, ind0, ind1, pointSet);
legalizeEdge(index, ind1, ind2, pointSet);
legalizeEdge(index, ind2, ind0, pointSet);
}
else if(ptrVec.size() == 2) {
std::shared_ptr<ListNode> ptr0 = ptrVec[0], ptr1 = ptrVec[1];
int ind00 = ptr0->tri_v0, ind01 = ptr0->tri_v1, ind02 = ptr0->tri_v2;
int ind10 = ptr1->tri_v0, ind11 = ptr1->tri_v1, ind12 = ptr1->tri_v2;
std::vector<int> tmpInd0; // points that are used twice
std::vector<int> tmpInd1; // points that are used once
if(ind00 == ind10 || ind00 == ind11 || ind00 == ind12) tmpInd0.push_back(ind00);
else tmpInd1.push_back(ind00);
if(ind01 == ind10 || ind01 == ind11 || ind01 == ind12) tmpInd0.push_back(ind01);
else tmpInd1.push_back(ind01);
if(ind02 == ind10 || ind02 == ind11 || ind02 == ind12) tmpInd0.push_back(ind02);
else tmpInd1.push_back(ind02);
if(tmpInd1[0] == ind01)
std::swap(tmpInd0[0], tmpInd0[1]);
if(ind10 != ind00 && ind10 != ind01 && ind10 != ind02) tmpInd1.push_back(ind10);
else if(ind11 != ind00 && ind11 != ind01 && ind11 != ind02) tmpInd1.push_back(ind11);
else tmpInd1.push_back(ind12);
std::shared_ptr<TreeNode> current_treenode0 = ptr0->treenode, current_treenode1 = ptr1->treenode;
std::shared_ptr<ListNode> new_listnode00(new ListNode(index, tmpInd1[0], tmpInd0[0]));
std::shared_ptr<ListNode> new_listnode01(new ListNode(index, tmpInd0[1], tmpInd1[0]));
new_listnode00->next = new_listnode01;
new_listnode01->pre = new_listnode00;
std::shared_ptr<ListNode> new_listnode10(new ListNode(index, tmpInd0[0], tmpInd1[1]));
std::shared_ptr<ListNode> new_listnode11(new ListNode(index, tmpInd1[1], tmpInd0[1]));
new_listnode10->next = new_listnode11;
new_listnode11->pre = new_listnode10;
std::shared_ptr<TreeNode> new_treenode00(new TreeNode(index, tmpInd1[0], tmpInd0[0]));
std::shared_ptr<TreeNode> new_treenode01(new TreeNode(index, tmpInd0[1], tmpInd1[0]));
std::shared_ptr<TreeNode> new_treenode10(new TreeNode(index, tmpInd0[0], tmpInd1[1]));
std::shared_ptr<TreeNode> new_treenode11(new TreeNode(index, tmpInd1[1], tmpInd0[1]));
linkEdge(new_listnode00);
linkEdge(new_listnode01);
linkEdge(new_listnode10);
linkEdge(new_listnode11);
crossLink(new_listnode00, new_treenode00);
crossLink(new_listnode01, new_treenode01);
crossLink(new_listnode10, new_treenode10);
crossLink(new_listnode11, new_treenode11);
current_treenode0->childNum = 2;
current_treenode0->child0 = new_treenode00;
current_treenode0->child1 = new_treenode01;
current_treenode1->childNum = 2;
current_treenode1->child0 = new_treenode10;
current_treenode1->child1 = new_treenode11;
if(ptr0->pre == nullptr)
head = new_listnode00;
else {
ptr0->pre->next = new_listnode00;
new_listnode00->pre = ptr0->pre;
}
if(ptr1->pre == nullptr)
head = new_listnode10;
else {
ptr1->pre->next = new_listnode10;
new_listnode10->pre = ptr1->pre;
}
new_listnode01->next = ptr0->next;
if(new_listnode01->next != nullptr)
new_listnode01->next->pre = new_listnode01;
new_listnode11->next = ptr1->next;
if(new_listnode11->next != nullptr)
new_listnode11->next->pre = new_listnode11;
unlinkEdge(ptr0);
unlinkEdge(ptr1);
ptr0.reset();
ptr1.reset();
legalizeEdge(index, tmpInd0[0], tmpInd1[0], pointSet);
legalizeEdge(index, tmpInd0[0], tmpInd1[1], pointSet);
legalizeEdge(index, tmpInd0[1], tmpInd1[0], pointSet);
legalizeEdge(index, tmpInd0[1], tmpInd1[1], pointSet);
}
}
如何进行边的翻转
在上面addPoint()函数中,添加完点并处理好链表顺序后就需要对新添加的边进行合规化处理。要做到这一点,首先需要利用到记录了每条边存储的三角形链表节点的二维数组edgeTable,在添加边和删除边的时候修改对应位置的元素(因为每条边最多对应两个三角形,所以这里的空间开销是$O(n^2)$大小的)。有了这个结构,我们就可以根据边的顶点得到其所在的三角形,进一步还可以分出属于这条边的两个顶点和另两个顶点。下一步我们要判断这条边是否合规。
首先,如果这条边所在的两个三角形组成的是一个凹四边形,那么是不需要判断的。判断是否为凸四边形的方法也很简单,就是判断两个对角的顶点是否在另一对顶点组成的边的同侧:
bool isConvex(int indr, int ind0, int ind1, int indl, const std::vector<Vector2f>& pointSet){
bool flag0, flag1;
flag0 = isLeft(ind0, indr, indl, pointSet);
flag1 = isLeft(ind1, indr, indl, pointSet);
return flag0 == flag1;
}
在确认了组成的是凸四边形后,通过比对两个对角的余弦值关系,就可以确定检测的边是否合规:
bool isLegal(int indr, int ind0, int ind1, int indl, const std::vector<Vector2f>& pointSet) {
if(ind0 <= 0 && ind1 <= 0) return true;
// is convex quadrilateral
bool flag0, flag1;
flag0 = isLeft(ind0, indr, indl, pointSet);
flag1 = isLeft(ind1, indr, indl, pointSet);
if(flag0 == flag1) return true;
if(indr < 0 || ind0 < 0 || ind1 < 0 || indl < 0) {
if(indr >= 0 && indl >= 0) return false;
else return true;
if(ind0 >= 0 && ind1 >= 0) return true;
}
Vector2f pr = pointSet[indr], p0 = pointSet[ind0], p1 = pointSet[ind1], pl = pointSet[indl];
float angleCosine0 = dotProduct(p0 - pr, p1 - pr) / ((p0 - pr).norm() * (p1 - pr).norm());
float angleCosine1 = dotProduct(p0 - pl, p1 - pl) / ((p0 - pl).norm() * (p1 - pl).norm());
if(-angleCosine0 > angleCosine1) return false;
return true;
}
对于需要翻转的边,合规化函数将要完成如下几件事:撤除原有的三角形;添加新的三角形;递归调用本身判断其他边。总体的代码如下:
inline void TriangleList::legalizeEdge(const int indr, const int ind0, const int ind1, const std::vector<Vector2f>& pointSet) {
if(edgeTable[ind0 + 2][ind1 + 2].size() < 2) return;
std::shared_ptr<ListNode> ptr0 = edgeTable[ind0 + 2][ind1 + 2][0], ptr1 = edgeTable[ind0 + 2][ind1 + 2][1];
int indl;
if(indr != ptr0->tri_v0 && indr != ptr0->tri_v1 && indr != ptr0->tri_v2)
std::swap(ptr0, ptr1); // indr is in ptr0->tri
if(ptr1->tri_v0 != ind0 && ptr1->tri_v0 != ind1) indl = ptr1->tri_v0;
else if(ptr1->tri_v1 != ind0 && ptr1->tri_v1 != ind1) indl = ptr1->tri_v1;
else indl = ptr1->tri_v2;
if(isLegal(indr, ind0, ind1, indl, pointSet)) return;
std::shared_ptr<TreeNode> current_treenode0 = ptr0->treenode, current_treenode1 = ptr1->treenode;
std::shared_ptr<ListNode> new_listnode0, new_listnode1;
std::shared_ptr<TreeNode> new_treenode0, new_treenode1;
if(isLeft(ind1, indr, indl, pointSet)) {
new_listnode0.reset(new ListNode(indr, indl, ind1));
new_listnode1.reset(new ListNode(indl, indr, ind0));
new_treenode0.reset(new TreeNode(indr, indl, ind1));
new_treenode1.reset(new TreeNode(indl, indr, ind0));
}
else {
new_listnode0.reset(new ListNode(indr, indl, ind0));
new_listnode1.reset(new ListNode(indl, indr, ind1));
new_treenode0.reset(new TreeNode(indr, indl, ind0));
new_treenode1.reset(new TreeNode(indl, indr, ind1));
}
crossLink(new_listnode0, new_treenode0);
crossLink(new_listnode1, new_treenode1);
linkEdge(new_listnode0);
linkEdge(new_listnode1);
current_treenode0->childNum = 2, current_treenode1->childNum = 2;
current_treenode0->child0 = new_treenode0, current_treenode0->child1 = new_treenode1;
current_treenode1->child0 = new_treenode0, current_treenode1->child1 = new_treenode1;
if(ptr0->pre == nullptr)
head = new_listnode0;
else {
ptr0->pre->next = new_listnode0;
new_listnode0->pre = ptr0->pre;
}
if(ptr1->pre == nullptr)
head = new_listnode1;
else {
ptr1->pre->next = new_listnode1;
new_listnode1->pre = ptr1->pre;
}
new_listnode0->next = ptr0->next;
if(new_listnode0->next != nullptr)
new_listnode0->next->pre = new_listnode0;
new_listnode1->next = ptr1->next;
if(new_listnode1->next != nullptr)
new_listnode1->next->pre = new_listnode1;
unlinkEdge(ptr0);
unlinkEdge(ptr1);
std::shared_ptr<ListNode> ptr = head;
ptr0.reset();
ptr1.reset();
legalizeEdge(indr, ind0, indl, pointSet);
legalizeEdge(indr, ind1, indl, pointSet);
}
设计3:画图API的调用
这部分的内容参考了GAMES101的作业07,利用opencv这个开源库,然后进行了相应的绘制。值得注意的是,在opencv提供的画图窗口,默认是左上角为原点,向右为x轴正方向,向下为y轴正方向,因此在利用鼠标事件获取点坐标和进行图形绘制的时候,都要做一个变换:
// Deal with mouse event
void mouse_handler(int event, int x, int y, int flags, void *userdata)
{
if (event == cv::EVENT_LBUTTONDOWN)
{
std::cout << "Left button of the mouse is clicked - position (" << x << ", "
<< height - y << ")" << '\n';
pointSet.emplace_back(x, height - y);
}
}
// Render per pixel
void setPixel(const float& x, const float& y, cv::Point3f color = cv::Point3f(255, 255, 255)) {
if(x + 0.5 > width || x < 0) return;
if(y + 0.5 > height || y < 0) return;
window.at<cv::Vec3b>(height - y - 0.5, x + 0.5)[0] = color.x;
window.at<cv::Vec3b>(height - y - 0.5, x + 0.5)[1] = color.y;
window.at<cv::Vec3b>(height - y - 0.5, x + 0.5)[2] = color.z;
}
经验与教训
- 在开始写代码的时候一定要先考虑清楚算法的正确性,避免出现先把全部内容都写完之后再回过头一点点检查
- 当处理各种点、边关系的时候,可以通过传入对应的 索引 而非具体点,这样可以节省很多处理的时间;
- 对于边的存储格式,完全可以利用邻接矩阵,这比哈希表好用
- 处理链表的连接关系的时候,记得考虑如果ptr->next == null的情况,此时如果直接做ptr->next->pre = ptr,就会发生段错误
- 利用智能指针而非原始指针来避免发生内存泄漏的问题
- 先声明再定义可以一定程度上避免交叉引用发生问题,但是对与类内新定义的结构体,即使先声明再定义,仍然会出现问题。这个时候就不能够在类内定义,而是先定义好了结构体之后(仍然要先声明)再在需要的类里面定义这个结构体类型的变量。